app注册传感器监听
Android Sensor Framework 的整体架构如下图所示:

前几篇sensor相关的文章介绍了sensor的hal的知识,以press_sensor实时显示气压坐标来分析,app层数据获取的过程,其实实现数据监控非常简单,主要分为下面三个步骤:
- 获取Sensor服务:getSystemService;
- 获取具体Sensor对象:getDefaultSensor;
- 注册数据监听器:registerListener;
SensorService启动
开机后,system server启动时,就会初始化sensor service,也就是说,开机后她一直都在后台运行着,客户端部分,直接connect就行了。至于怎么connect,这一切都被封装到SensorManager里了。
SensorService服务启动后,在随后的第一次被强引用时,其onFirstRef会被调用,紧接着,它会获取我们的SensorDevice实例:
void SensorService::onFirstRef() {
ALOGD("nuSensorService starting...");
SensorDevice& dev(SensorDevice::getInstance());
sHmacGlobalKeyIsValid = initializeHmacKey();
if (dev.initCheck() == NO_ERROR) {
sensor_t const* list;
ssize_t count = dev.getSensorList(&list);
if (count > 0) {附上这部分的流程
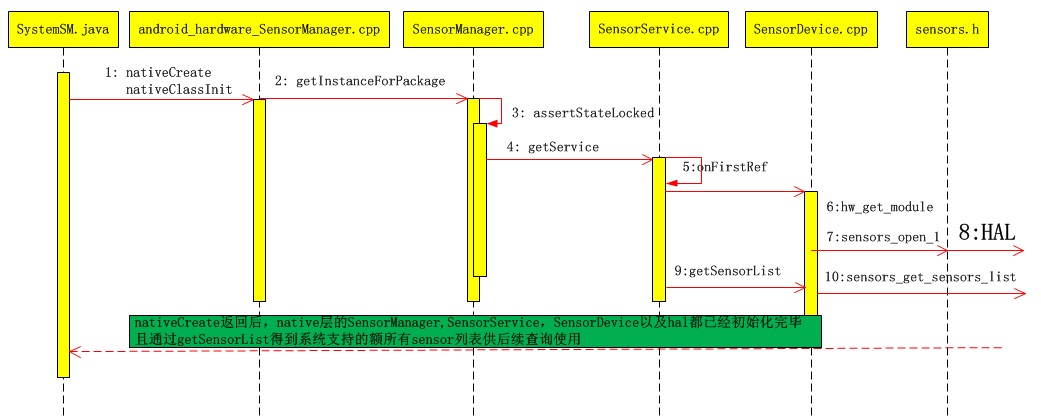
SensorDevice作为Sensor架构中native的最后一个文件,与Hal层进行通信,故而在SensorDevice的构造方法中,我们就可以看到著名的hw_get_module和sensors_open_1方法了:
SensorDevice::SensorDevice()
: mSensorDevice(0),
mSensorModule(0) {
status_t err = hw_get_module(SENSORS_HARDWARE_MODULE_ID,
(hw_module_t const**)&mSensorModule);
ALOGE_IF(err, "couldn't load %s module (%s)",
SENSORS_HARDWARE_MODULE_ID, strerror(-err));
if (mSensorModule) {
err = sensors_open_1(&mSensorModule->common, &mSensorDevice);
ALOGE_IF(err, "couldn't open device for module %s (%s)",
SENSORS_HARDWARE_MODULE_ID, strerror(-err));
if (mSensorDevice) {
if (mSensorDevice->common.version == SENSORS_DEVICE_API_VERSION_1_1 ||
mSensorDevice->common.version == SENSORS_DEVICE_API_VERSION_1_2) {
ALOGE(">>>> WARNING <<< Upgrade sensor HAL to version 1_3");
}
sensor_t const* list;
ssize_t count = mSensorModule->get_sensors_list(mSensorModule, &list);
mActivationCount.setCapacity(count);
Info model;
for (size_t i=0 ; i<size_t(count) ; i++) {
mActivationCount.add(list[i].handle, model);
mSensorDevice->activate(
reinterpret_cast<struct sensors_poll_device_t *>(mSensorDevice),
list[i].handle, 0);
}
}
}
}
其中SENSORS_HARDWARE_MODULE_ID是在hardware/sensors.h中定义的module名字:
/**
* The id of this module
*/
#define SENSORS_HARDWARE_MODULE_ID "sensors"而mSensorModule就是我们的sensors_module_t结构体,这些都是在hal层sensors.h中定义的:
/**
* Every hardware module must have a data structure named HAL_MODULE_INFO_SYM
* and the fields of this data structure must begin with hw_module_t
* followed by module specific information.
*/
struct sensors_module_t {
struct hw_module_t common;
/**
* Enumerate all available sensors. The list is returned in "list".
* @return number of sensors in the list
*/
int (*get_sensors_list)(struct sensors_module_t* module,
struct sensor_t const** list);
/**
* Place the module in a specific mode. The following modes are defined
*
* 0 - Normal operation. Default state of the module.
* 1 - Loopback mode. Data is injected for the supported
* sensors by the sensor service in this mode.
* @return 0 on success
* -EINVAL if requested mode is not supported
* -EPERM if operation is not allowed
*/
int (*set_operation_mode)(unsigned int mode);
};
可以看到sensors_module_t结构体扩展了hw_module_t,它里面额外提供了get_sensor_list方法来获取系统支持的sensor列表以及一个模式设置方法。
接下来,我们跟进hw_get_module方法,看看它到底做了什么?
hw_get_module
该函数具体实现在hardware/libhardware/h