如图:
假设为三维空间有一个向量R 满足关系:
即为加速度计的x轴,y轴,z轴。
对于MPU6050 其求出的数值为:
分母为灵敏度, ADCRx为读出值。
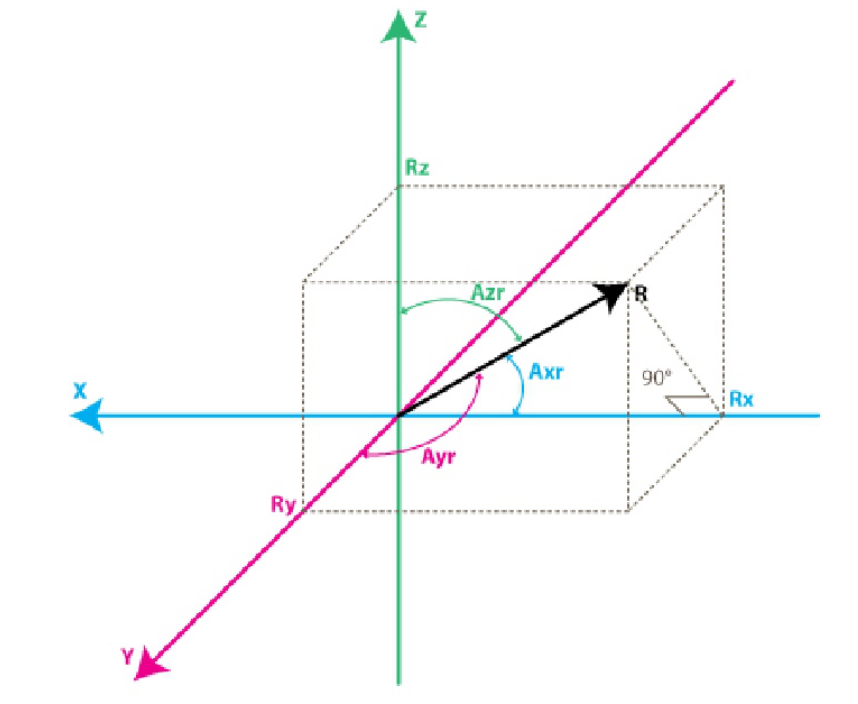
我关心的是Axr,Ayr,Azr即 Rx Ry Rz与X,Y,Z轴的夹角
则:
Axr = arccos()
eg. 当MPU6050模块水平放置时, 假设无误差, 则此时z轴受到重力 Rz = 1g, Rx =0,Ry = 0;
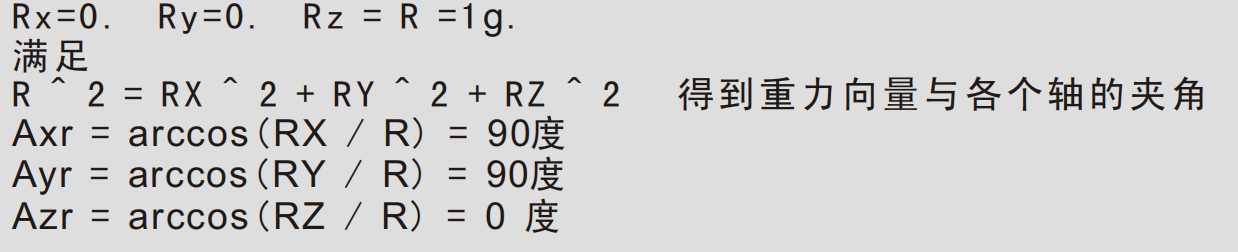
然而实际使用水平放置时并不理想。