
�������ӣ����쳵������һ�������������˴�����Ѷ���������� www.xtark.cn �������˲��� www.cnblogs.com/xtark/ ��
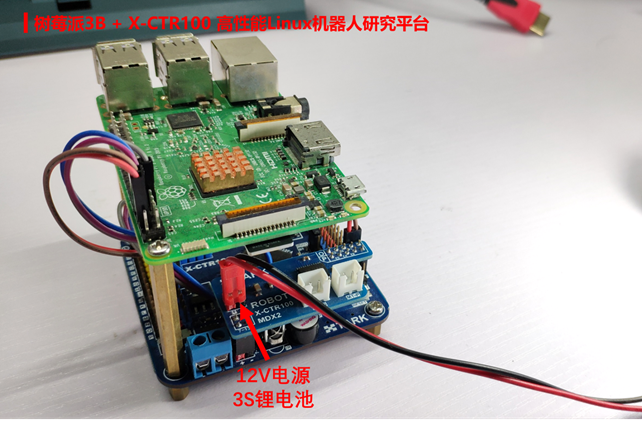
���Ľ���X-CTR100����������ݮ��Linuxϵͳ��ɻ�����ƽ̨�����Ƚ�������ݮ�ɴ���ͨ�ţ�����ܻ�����ƽ̨�����������λ��ƽ̨�ܹ������ڻ�����ROSϵͳ�����С���������Linux�����˿����г��õ��������ߣ�������ש����
�����
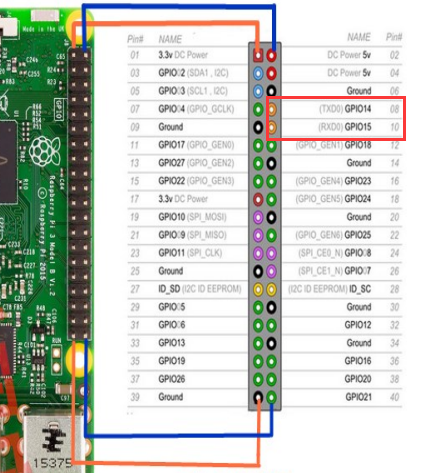
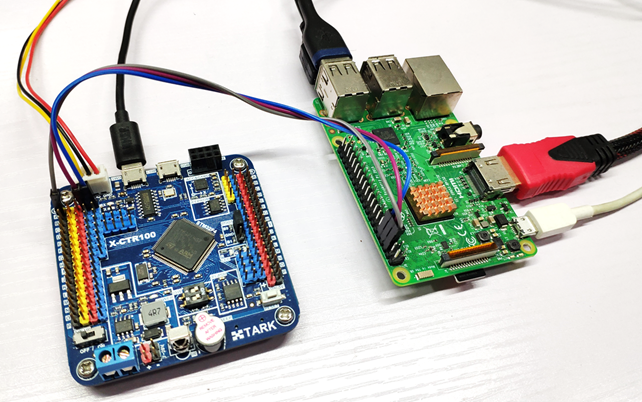
����ʹ����ݮ��Ӳ���汾Ϊ3B+��GPIO��չ�ӿھ���1·���ڣ�������X-CTR100������ͨ�š�
���ǿ�������λ��������ϵͳ�������������ROS�ܹ���GPIO�Ĵ������Ŷ������¡�
��������ϵͳʹ��NOOBS��װ��NOOBS�汾2.8.2��2018-06-27���¡�
��װ��ݮ���ٷ�Raspbian Stretch�汾��
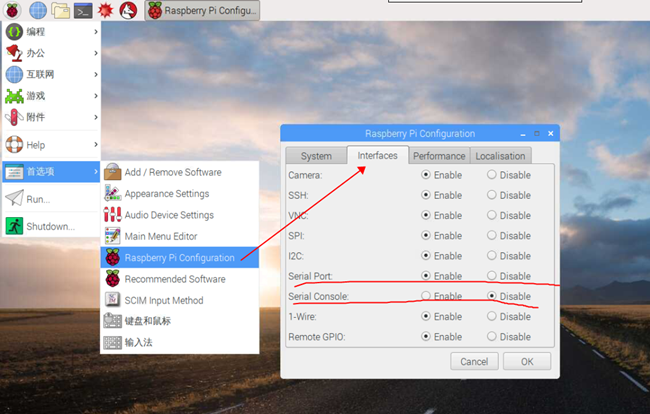
Ĭ��״̬��ݮ�ɴ����ǹرյģ���Ҫ���ڣ����رմ����նˣ����¡����δ�رմ����նˣ��Ĵ��ڻ��ӡϵͳ������Ϣ��
������������鿴����״̬��ttyS0Ϊ����Ҫʹ�õ���չ�ӿ��ϵĴ��ڡ�
ls -l /dev
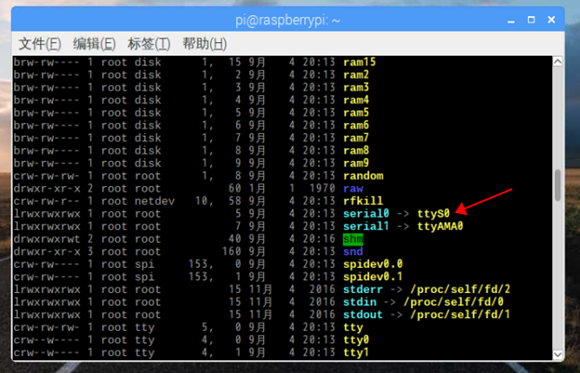
��ʱ�����������Ͻ̳��������κ�����ӳ���ļ�������ʹ��ttyS0ͨ�š�
��ݮ����PC������ͨ�Ų���
���Ȳ�����ݮ��������ͨ���Ƿ����������Բ�����ݮ����PC������ͨ�š�Ӳ��ƽ̨���¡�

����ʹ��һ��ͼ��Linux���ڹ���cutecom����ȻҲ���Գ��õ�minicom��picocom��
��������Linux��ʹ�ý϶࣬����Ϊ�ı����ߣ��������Ѷȡ�
cutecom����ͨ��
cutecom��װ�dz���ʹ��apt-get������¡�
sudo apt-get install cutecom
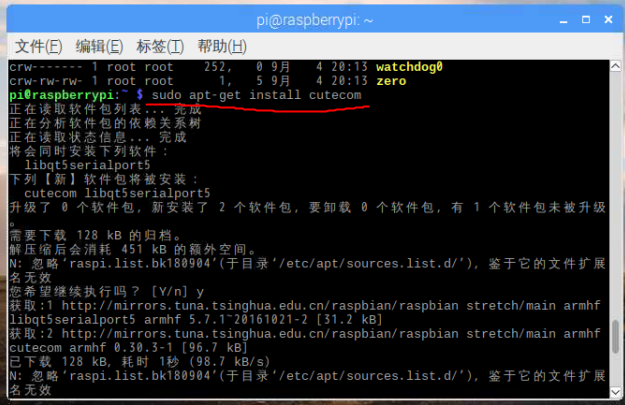
��װ��ɺ�����������������������ڲ�����ҪrootȨ�ޡ�
sudo cutecom
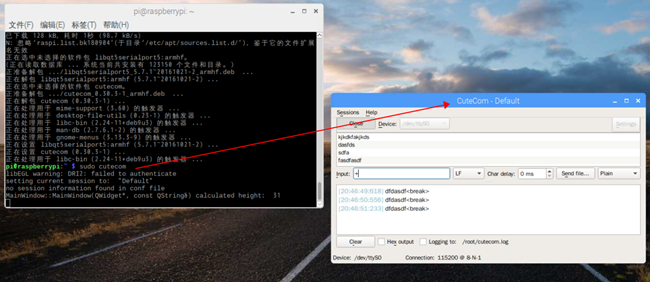
���ô����豸Ϊ/dev/ttyS0�������豸������ʵ�ִ��������շ���

minicom����ͨ��
minicom������װǰע���������Դ��ͨ��ʹ�����װ����apt-get install��
sudo apt-get install minicom
Ҳ����ʹ��ͼ�λ��ķ�ʽ��װһ�����������ڵ��Թ���minicom��ʹ��ϵͳ�Դ��� "Add /Remove Software"������

���նˣ����������ttyS0���ڡ�
sudo minicom �Cb 115200 �Co �CD /dev/ttyS0

�����������£�Ϊ�ı����档
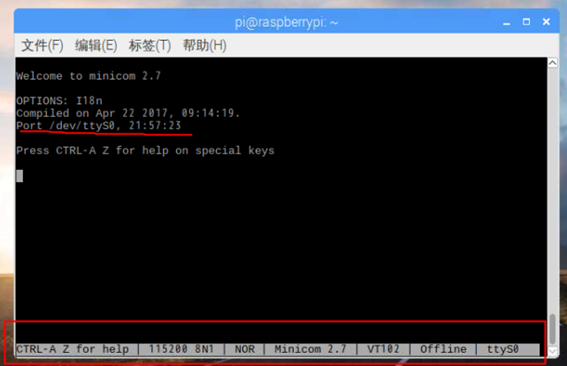
��ݮ�ɼ��������ַ����ɴ��䵽PC����PC�������ַ�����ݮ�ɡ�

��������̶���Ҳ��ʹ�������������minicom���������������ո�����������
sudo minicom �Cs
�������ý��棬ѡ"Serial port setup"���д������á�����ͼ���ã��ص�Aѡ�ʹ������ơ�
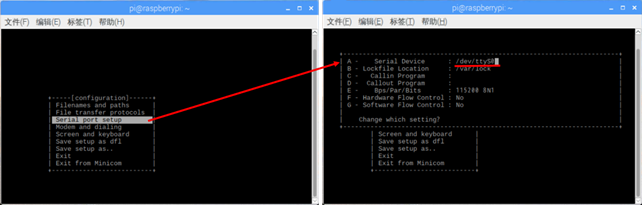
Ȼ��������ý��棬ѡ��"Save setup as dfl"�������ã���ѡ��"Exit"�˳���
������������������ɰ����������ݴ��ڡ�
sudo minicom
�˳�minicom������������ʾ��CTRL+A������help���棬��X�˳�����Z�鿴������

������ʱ���������������ʾ����ͨ������/var/lock�ļ��У�ɾ��"LCK..ttyS0"����������һ��Ϊ����رմ��ڵ��¡�
Device /dev/ttyS0 is locked.

��ݮ����X-CTR100����ͨ�Ų���
Ӳ������
�����̲�����ݮ����X-CTR100����ͨ���Ƿ�������Ӳ��ƽ̨���£���ݮ������UART1��
��������
X-CTR100���������ء�X-CTR100 l ��ݮ�ɴ���ͨ������(ѭ������)�����̣�X-CTR100��ÿ��1S����һ�δ������ݡ���ݮ��ʹ��minicom���գ����Խ�����¡�

��ݮ����X-CTR100 python����ͨ��
minicom�����������;��������������Ҫ��̽������ݮ�����еı������Ϊpython���ԣ��������ʹ��python��д����ͨ�Ŵ��룬ʹ��python��serial��չ�⡪��pyserialʵ�֡�
Ӳ������
�����̲�����ݮ����X-CTR100 python����ͨ�Ź��ܡ���������ݮ�ɴ�������UART3��LB�ӿڣ���
pyserial��װ
��װpyserial��չ���кܶ��ַ�������ʹ��pip����easy_install��װ��Ҳ����ֱ��ѡ��apt-get���߰�װ����ʹ��apt-get���߰�װ������������ָ��
sudo apt-get install python-serial
python����
����ʵ����ݮ��ѭ����X-CTR100�������������ݹ��ܡ�
# -*- coding: utf-8 -* import serial import time # ���� ser = serial.Serial("/dev/ttyS0", 9600,timeout =0.5) # ѭ������ while 1: ser.write('Hello X-CTR100\r\n'.encode()) time.sleep(1) #�رմ��� ser.close() |
��������
X-CTR100���������ء�X-CTR100 l ��ݮ�ɴ���ͨ������(��������)�����̡�����ʵ��UART3������ݮ�ɷ��͵����ݣ���ͨ��USB������ʾ�������ݣ������յ�'\n'����תLED��ָʾ״̬��������UART3�жϽ��ղ��ִ������¡�
int main(void) { /* X-CTR100��ʼ�� */ AX_Init(115200);
printf("***X-CTR100 ������ݮ�ɴ������ݲ�������***\r\n");
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2); //�����ж����ȼ�����
AX_UART_Init();
while (1) { AX_Delayms(1000); //��ʱ100ms } }
/** * @�� �� �����жϷ������ * @�� �� �� * @����ֵ �� */ void USART3_IRQHandler(void) { uint8_t Res;
if (USART_GetITStatus(USART3, USART_IT_RXNE) != RESET) //�����ж� {
Res = USART_ReceiveData(USA |
| ��ҳ ��һҳ 1 2 3 ��һҳ βҳ 1/3/3 | |
| ���� �� С������ӡ�� ����������Ͷ�������ղ��� ���Ƽ������ٱ����������� ���ر��� �����ض����� | |
| ��һƪ��Linux�ڴ�����֮����--Linux�ڴ�.. | ��һƪ������STM32�ļ���������� |