前面3篇我们讲解了camera的基础概念,MIPI协议,CSI2,常用命令等,本文带领大家入门,如何用c语言编写应用程序来操作摄像头。
Linux下摄像头驱动都是基于v4l2架构,要基于该架构编写摄像头的应用程序,必须先要搞清楚什么是v4l2。
1. 什么是v4l2
v4l2是video for Linux 2的缩写,是一套Linux内核视频设备的驱动框架,该驱动框架为应用层提供一套统一的操作接口(一系列的ioctl)
https://linuxtv.org/downloads/legacy/video4linux/API/V4L2_API/
官网有一个简单的用于抓图的程序capture.c。
本文后面基于该实例编写一个最简单的抓图程序。
v4l2接口
V4L2 :video for linux 2 ,是 linux ??套标准的视频驱动,让应?层可以像访问普通?件?样对/dev/videoX 节点进? open 、 read 、 ioctl 等操作。
V4L2在设计时,是要支持很多广泛的设备的,它们之中只有一部分在本质上是真正的视频设备,可以支持多种设备,它可以有以下几种接口:
1. video capture interface(捕获):
视频采集接口,这种接口应用于摄像头,v4l2在最初设计的时候就是应用于这种功能
2. video output interface(输出):
视频输出接口,将静止图像或图像序列编码为模拟视频信号,通过此接口,应用程序可以控制编码过程并将图像从用户空间移动到驱动程序
3. video overlay interface(预览):
视频直接传输接口,可以将采集到的视频数据直接传输到显示设备,不需要cpu参与,这种方式的显示图像的效率比其他方式高得多
本文主要讲解如何使用capture功能。
2. 截取图象的3种方法
1)用mmap(内存映射)方式截取视频
mmap( )系统调用使得进程之间通过映射同一个普通文件实现共享内存。普通文件被映射到进程地址空间后,进程可以向访问普通内存一样对文件进行访问,不必再调用read(),write()等操作。
两个不同进程A、B共享内存的意思是,同一块物理内存被映射到进程A、B各自的进程地址空间。进程A可以即时看到进程B对共享内存中数据的更新,反之亦然
采用共享内存通信的一个显而易见的好处是效率高,因为进程可以直接读写内存,而不需要任何数据的拷贝
*(1)设置picture的属性
*(2) 初始化video_mbuf,以得到所映射的buffer的信息
ioctl(vd->fd, VIDIOCGMBUF, &(vd->mbuf))
*(3)可以修改video_mmap和帧状态的当前设置
Eg. vd->mmap.format = VIDEO_PALETTE_RGB24
vd->framestat[0] = vd->framestat[1] = 0; vd->frame = 0;
*(4)将mmap与video_mbuf绑定
void* mmap ( void * addr , size_t len , int prot , int flags , int fd , off_t offset )
len //映射到调用进程地址空间的字节数,它从被映射文件开头offset个字节开始算起
Prot //指定共享内存的访问权限 PROT_READ(可读), PROT_WRITE (可写), PROT_EXEC (可执行)
flags // MAP_SHARED MAP_PRIVATE中必选一个 // MAP_ FIXED不推荐使用addr //共内存享的起始地址,一般设0,表示由系统分配
Mmap( ) 返回值是系统实际分配的起始地址
if((vd->map = (unsigned char*)mmap(0, vd->mbuf.size, PROT_READ|PROT_WRITE, MAP_SHARED, vd->fd, 0)) < 0)
{
perror("v4l_mmap mmap:");
return -1;
}
*(5)Mmap方式下真正做视频截取的 VIDIOCMCAPTURE
ioctl(vd->fd, VIDIOCMCAPTURE, &(vd->mmap)) ;
若调用成功,开始一帧的截取,是非阻塞的,
是否截取完毕留给VIDIOCSYNC来判断
*(6)调用VIDIOCSYNC等待一帧截取结束
if(ioctl(vd->fd, VIDIOCSYNC, &frame) < 0)
{
perror("v4l_sync:VIDIOCSYNC");
return -1;
}
若成功,表明一帧截取已完成。可以开始做下一次 VIDIOCMCAPTURE
frame是当前截取的帧的序号。
关于双缓冲:
video_bmuf bmuf.frames = 2;
一帧被处理时可以采集另一帧
int frame; //当前采集的是哪一帧
int framestat[2]; //帧的状态 没开始采集|等待采集结束
帧的地址由vd->map + vd->mbuf.offsets[vd->frame]得到
采集工作结束后调用munmap取消绑定
munmap(vd->map, vd->mbuf.size)
2)视频截取的第二种方法:直接读设备
关于缓冲大小,图象等的属性须由使用者事先设置
int read (要访问的文件描述符;指向要读写的信息的指针;应该读写的字符数);
返回值为实际读写的字符数
实例:
int len ;
unsigned char *vd->map= (unsigned char *) malloc(vd->capability.maxwidth*vd->capability.maxheight );
len = read(vd->fd,vd->map, vd->capability.maxwidth*vd->capability.maxheight*3 );
3)用户指针
3. v4l2 设备操作说明
对设备的大多数操作都是应用层通过调用ioctl实现的,
不同的命令需要操作不同的文件设备节点,
具体的需要根据拓扑结构来决定操作那个字符设备。
以下是瑞芯微rk3568平台的摄像头拓扑图,移植了ov13850摄像头。
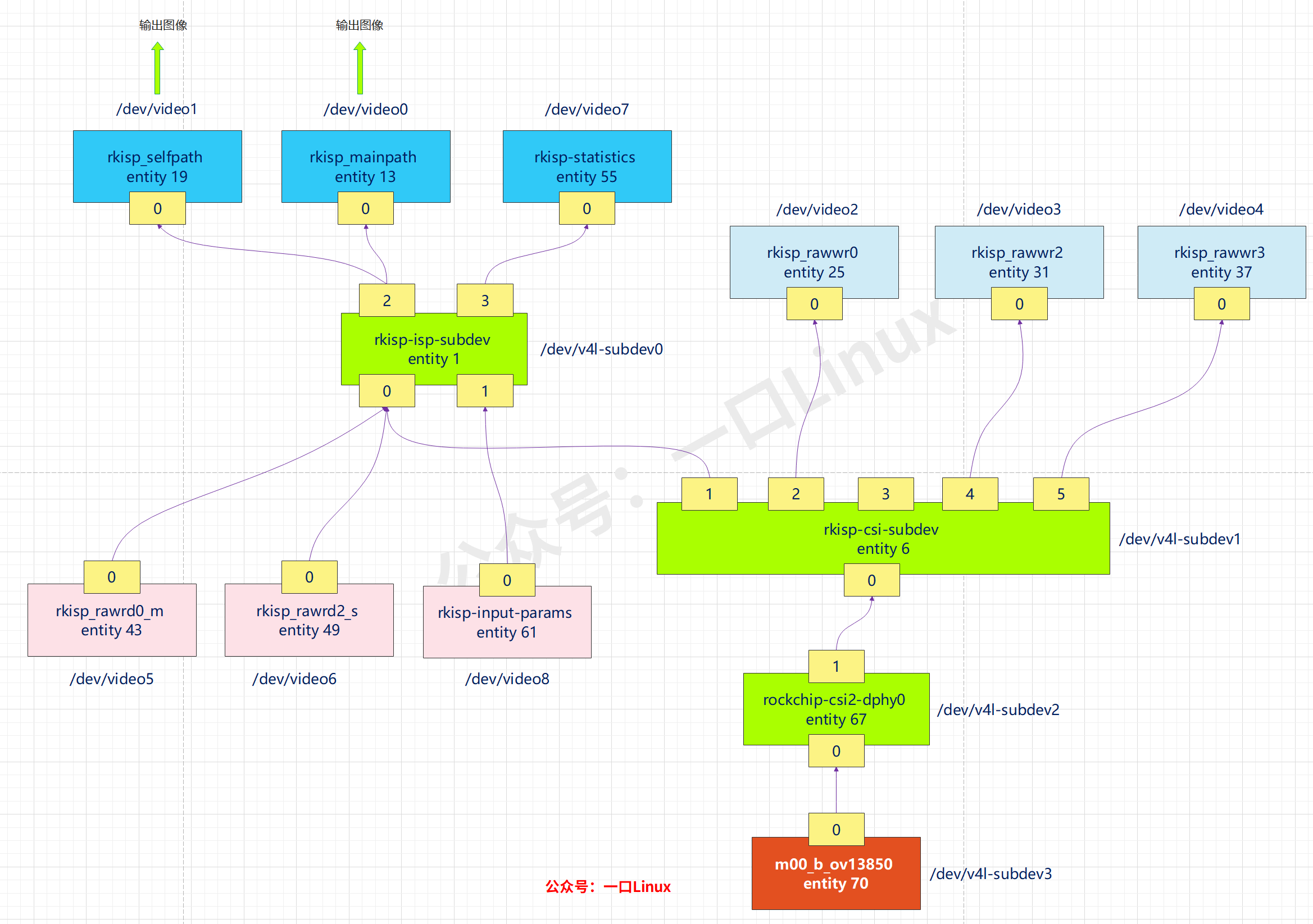
- 其中摄像头对应的此设备为: /dev/v4l-subdev3
- 应用层要配置通用配置、或者获取图像,需要操作设备 /dev/video0
- 有一些摄像头专用的命令,我们可以操作 /dev/v4l-subdev3
ov13850摄像头驱动中注册了一些命令对应的回调函数:

这些回调函数都注册到了V4L2架构中,我们可以通过字符设备 /dev/videox,、/dev/v4l-subdevx 直接或者间接访问到这些回调函数。
V4L2定义了一些通用的命令,操作字符设备 /dev/videox即可调用,命令具体定义如下:
kernel\drivers\media\v4l2-core\v4l2-ioctl.c
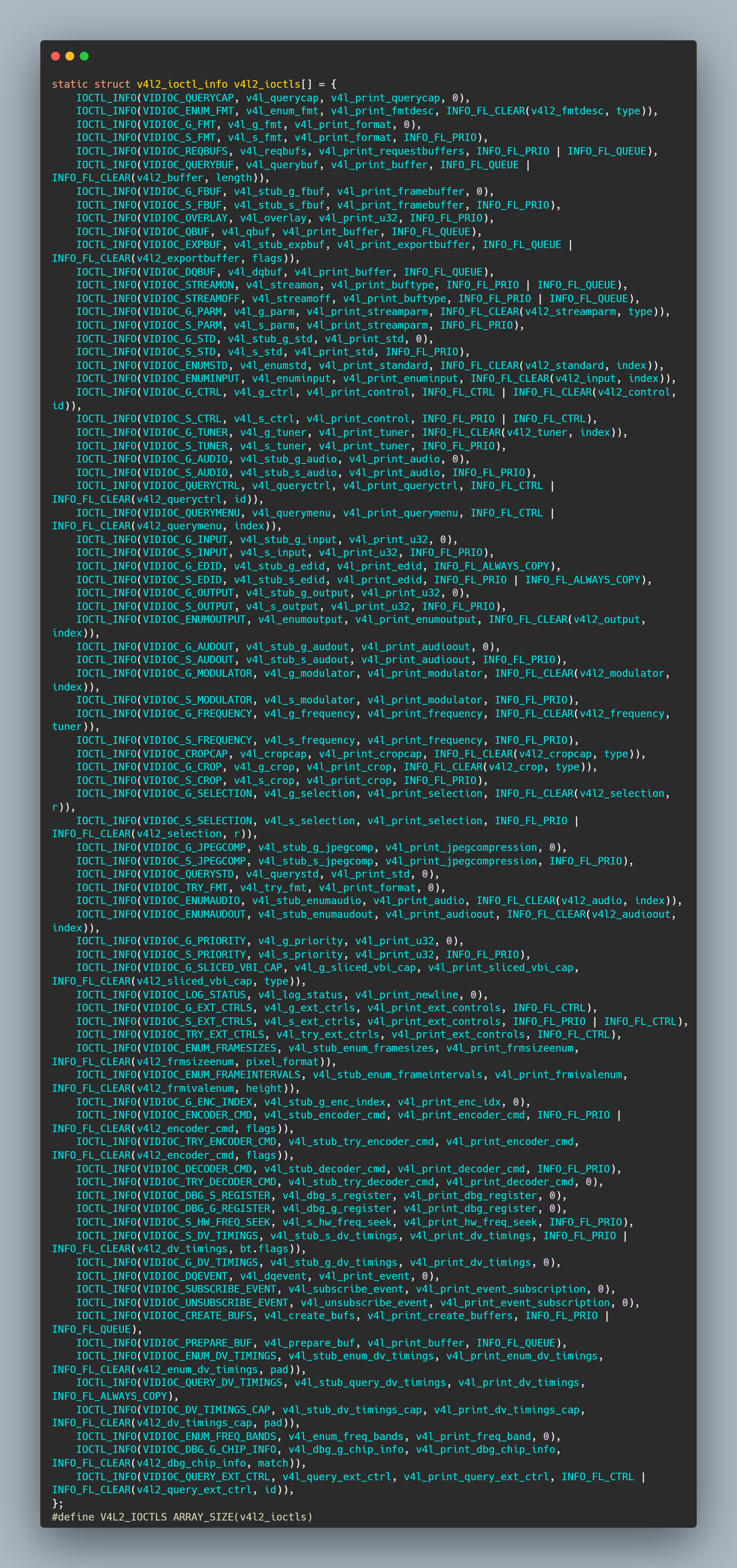
可以通过数组名+命令对应的数值方式访问对应的回调函数。
该数组定义如下:
struct v4l2_ioctl_info {
unsig