row1_col1;
row2_col2 <= line2_data;
row2_col1 <= row2_col2;
row2_col0 <= row2_col1;
end
else begin
row0_col2 <= row0_col2;
row0_col1 <= row0_col1;
row0_col0 <= row0_col0;
row1_col2 <= row1_col2;
row1_col1 <= row1_col1;
row1_col0 <= row1_col0;
row2_col2 <= row2_col2;
row2_col1 <= row2_col1;
row2_col0 <= row2_col0;
end
else begin
row0_col0 <= 'd0;
row0_col1 <= 'd0;
row0_col2 <= 'd0;
row1_col0 <= 'd0;
row1_col1 <= 'd0;
row1_col2 <= 'd0;
row2_col0 <= 'd0;
row2_col1 <= 'd0;
row2_col2 <= 'd0;
end
end
always @(posedge clk) begin
data_in_valid_dly1 <= data_in_valid;
data_in_valid_dly2 <= data_in_valid_dly1;
data_in_valid_dly3 <= data_in_valid_dly2;
data_in_hs_dly1 <= data_in_hs;
data_in_hs_dly2 <= data_in_hs_dly1;
data_in_hs_dly3 <= data_in_hs_dly2;
data_in_vs_dly1 <= data_in_vs;
data_in_vs_dly2 <= data_in_vs_dly1;
data_in_vs_dly3 <= data_in_vs_dly2;
end
assign data_out_valid = data_in_valid_dly3;
assign data_out_hs = data_in_hs_dly3;
assign data_out_vs = data_in_vs_dly3;
shift_register_2taps
#(
.DATA_WIDTH (DATA_WIDTH)
)
shift_register_2taps_inst
(
.clk (clk),
.shiftin (data_in),
.shiftin_valid (data_in_valid),
.shiftout (),
.taps1x (line1_data),
.taps0x (line0_data)
);
assign line2_data = data_in;
//----------------------------------------------------
// mask x mask y
//[-1,0,1] [ 1, 2, 1]
//[-2,0,2] [ 0, 0, 0]
//[-1,0,1] [-1,-2,-1]
//----------------------------------------------------
assign Gx_is_positive = (row0_col2 + row1_col2*2 + row2_col2) >=
(row0_col0 + row1_col0*2 + row2_col0);
assign Gy_is_positive = (row0_col0 + row0_col1*2 + row0_col2) >=
(row2_col0 + row2_col1*2 + row2_col2);
always @(posedge clk or posedge reset_p) begin
if(reset_p)
Gx_absolute <= 'd0;
else if(data_in_valid_dly1) begin
if(Gx_is_positive)
Gx_absolute <= (row0_col2 + row1_col2*2 + row2_col2) - (row0_col0 + row1_col0*2 + row2_col0);
else
Gx_absolute <= (row0_col0 + row1_col0*2 + row2_col0) - (row0_col2 + row1_col2*2 + row2_col2);
end
end
always @(posedge clk or posedge reset_p) begin
if(reset_p)
Gy_absolute <= 'd0;
else if(data_in_valid_dly1) begin
if(Gy_is_positive)
Gy_absolute <= (row0_col0 + row0_col1*2 + row0_col2) - (row2_col0 + row2_col1*2 + row2_col2);
else
Gy_absolute <= (row2_col0 + row2_col1*2 + row2_col2) - (row0_col0 + row0_col1*2 + row0_col2);
end
end
//----------------------------------------------------
//result
//----------------------------------------------------
always @(posedge clk or posedge reset_p) begin
if(reset_p)
data_out <= 1'b0;
else if(data_in_valid_dly2) begin
data_out <= ((Gx_absolute+Gy_absolute)>threshold) ? 1'b0 : 1'b1;
end
end
endmodule
5、仿真
仿真过程有复杂,调了许久,这里暂不写出。
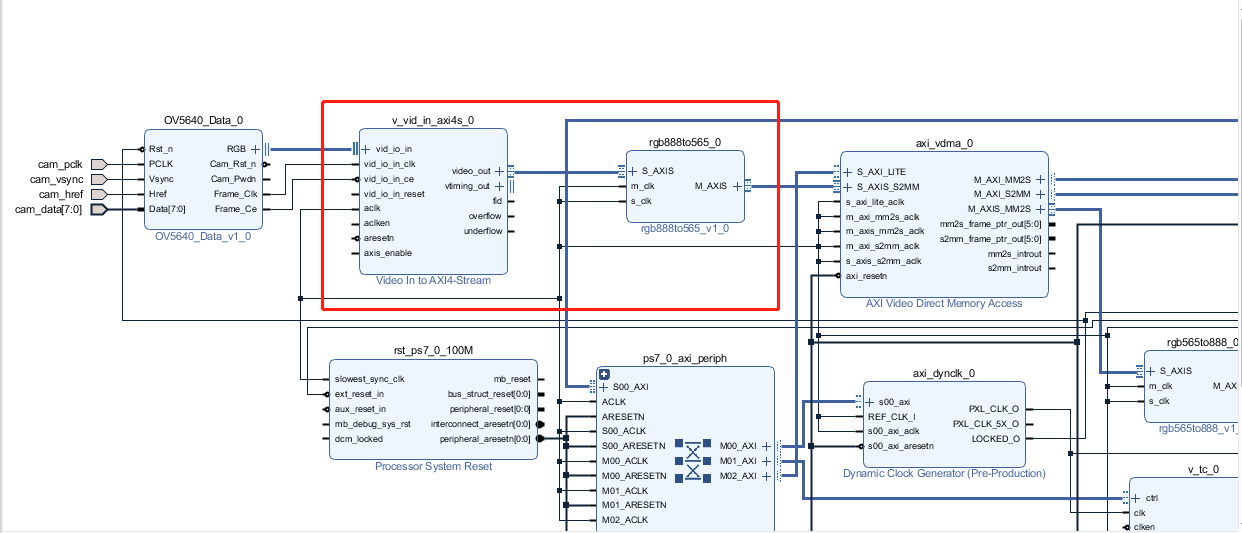
6、上板验证
本次还是在小梅哥的OV5640_TFT这个工程的基础上进行修改,并将上面提到的模块打包成IP核,在block design里进行链接。
(1)删除红框内的模块
(2)修改OV5640_data_0 IP核
module OV5640_Data_v1_0(
Rst_n, //复位
PCLK, //像素时钟
Vsync, //场同步信号
Href, //行同步信号
Data, //数据
DataValid, //数据有效信号
DataPixel, //像素数据
Frame_Clk //时钟信号
);
input Rst_n; //复位
input PCLK; //像素时钟
input Vsync; //场同步信号
input Href; //行同步信号
input [7:0]Data; //数据
output DataValid; //数据有效信号
output [15:0]DataPixel; //像素数据
output Frame_Clk;//时钟信号
reg r_Vsync;
reg r_Href;
reg [7:0]r_